Submitted by Craig McDonald on
Category:
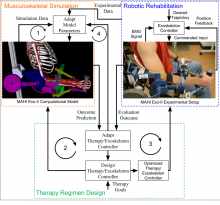
Robotic exoskeletons can be effective tools for providing repetitive and high dose rehabilitation therapy. However, currently there is a lack of techniques to design therapy systematically using the myriad of subject-specific experimental data that is available from these devices. We envision an objective and systematic approach that combines experimental data with computational simulations for designing robot-assisted rehabilitation therapies. To this end, we present a methodology for estimating joint moments in the arm during upper extremity robotic training using a computational model of the coupled arm-exoskeleton system. Experimental data were collected on an upper limb exoskeleton, MAHI Exo-II, with and without the subject’s arm in the robot while it performed a passive elbow flexion-extension motion. We created a computational model of the coupled arm-exoskeleton system in OpenSim. We then developed a three step computational approach in OpenSim for estimating joint moments in the arm during the passive “with arm” trial. First, we estimated joint kinematics in the arm using an inverse kinematic analysis based on the combined model and data from the “with arm” trial. Second, we estimated combined friction/damping torques in the robot joints using a mixed dynamic analysis and data from the “without arm” trial. Finally, we estimated the joint moments in the arm using a second mixed dynamic analysis using the combined arm-robot model and friction/damping compensated data from the “with arm” trial. Computational models of the coupled human-robot system may be valuable for systematic design of robotic rehabilitation therapy using quantitative data from robotic devices. Such models could also help in developing subject-specific therapy regimens that yield improved motor recovery.