Submitted by Will Jantscher on
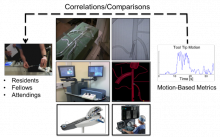
In the current curriculum of surgical training, skills are taught to interns through demonstrations and then later evaluated by experienced residents. As a result, the system is both costly and inefficient. Residents’ time is valuable and surgical techniques vary between individuals, resulting in inconsistent evaluations. Previous research has been shown to have a strong correlation with performance in dexterous tasks. We have been able to accurately identify skill level of endovascular surgeons based on the metrics of spectral arc length and submovement count (from tooltip motion during tasks). While this is a step in creating an objective evaluation technique for surgical training, it also serves as a basis for a feedback mechanism to aid in performance and skill acquisition.
Since surgery is a skill that heavily saturates the visual and auditory domains, we have chosen to deliver performance feedback haptically (via touch). In order to explore the most effective way to translate performance metrics to haptic feedback we created a test platform to expand our subject pool from surgical residents and interns to all healthy adults. This program is based off previous research on mirror tracing. This is a task that requires the subject to trace a star while their perceived motions are inverted along both axes. The task is challenging but exhibits a strong learning curve, allowing us to track performance over time and evaluate the effects of implementing feedback.
We are currently investigating the most effective method of translating our motion based metrics into haptic cues for delivery to the user in real-time. The next step will be to implement the chosen model in endovascular surgery simulators. This research holds potential for new methods in surgical training and can be adapted as a method for training a variety of fine motor skills.
, “Toward improved surgical training: Delivering smoothness feedback using haptic cues”, Haptics Symposium (HAPTICS). IEEE, San Francisco, CA, pp. 241-246, 2018.
, “Expert Surgeons Can Smoothly Control Robotic Tools With a Discrete Control Interface”, IEEE Transactions on Human-Machine Systems, vol. 49, pp. 388–394, 2019.