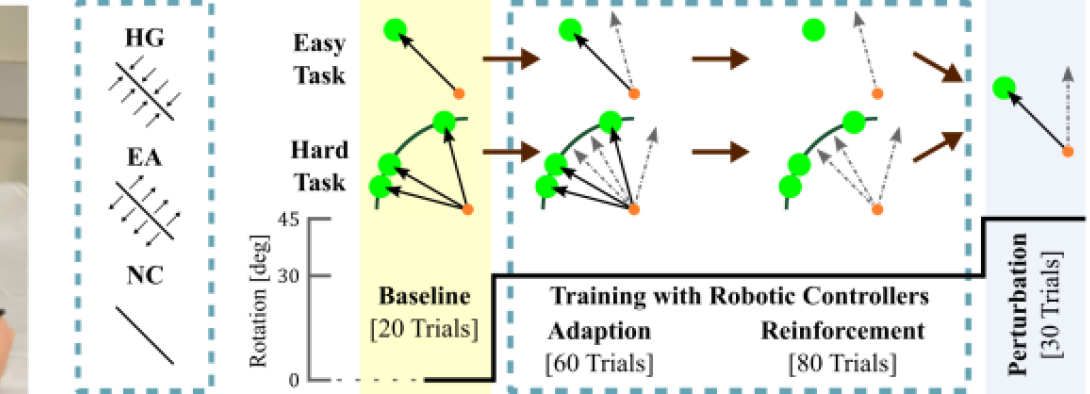
There has been significant research aimed at leveraging programmable robotic devices to provide haptic assistance or augmentation to a human user so that new motor skills can be trained efficiently and retained long after training has concluded. The success of these approaches has been varied, and retention of skill is typically not significantly better for groups exposed to these controllers during training. These findings point to a need to incorporate a more complete understanding of human motor learning principles when designing haptic interactions with the trainee. Reward-based reinforcement has been studied for its role in improving retention of skills. Haptic guidance, which assists a user to complete a task, and error augmentation, which exaggerates error in order to enhance feedback to the user, have been shown to be beneficial for training depending on the task difficulty, subject ability, and task type. In this research, we combine the presentation of reward-based reinforcement with these robotic controllers to evaluate their impact on retention of motor skill in a visual rotation task with tunable difficulty using either fixed or moving targets. We found that with the reward-based feedback paradigm, both haptic guidance and error augmentation led to better retention of the desired visuomotor offset during a simple task, while during a more complex task, only subjects trained with haptic guidance demonstrated performance superior to those trained without a controller.
Rehabilitation Robotics