
Though mechanical aspects of prosthesis technology are rapidly advancing, these devices lack a sense of touch required for providing feedback when completing different tasks. We aim to address this concern by developing non-invasive technologies to provide missing touch sensations in prosthetic limbs via sensory substitution with modular add-on devices separate from the prosthesis.
Lower Limb:
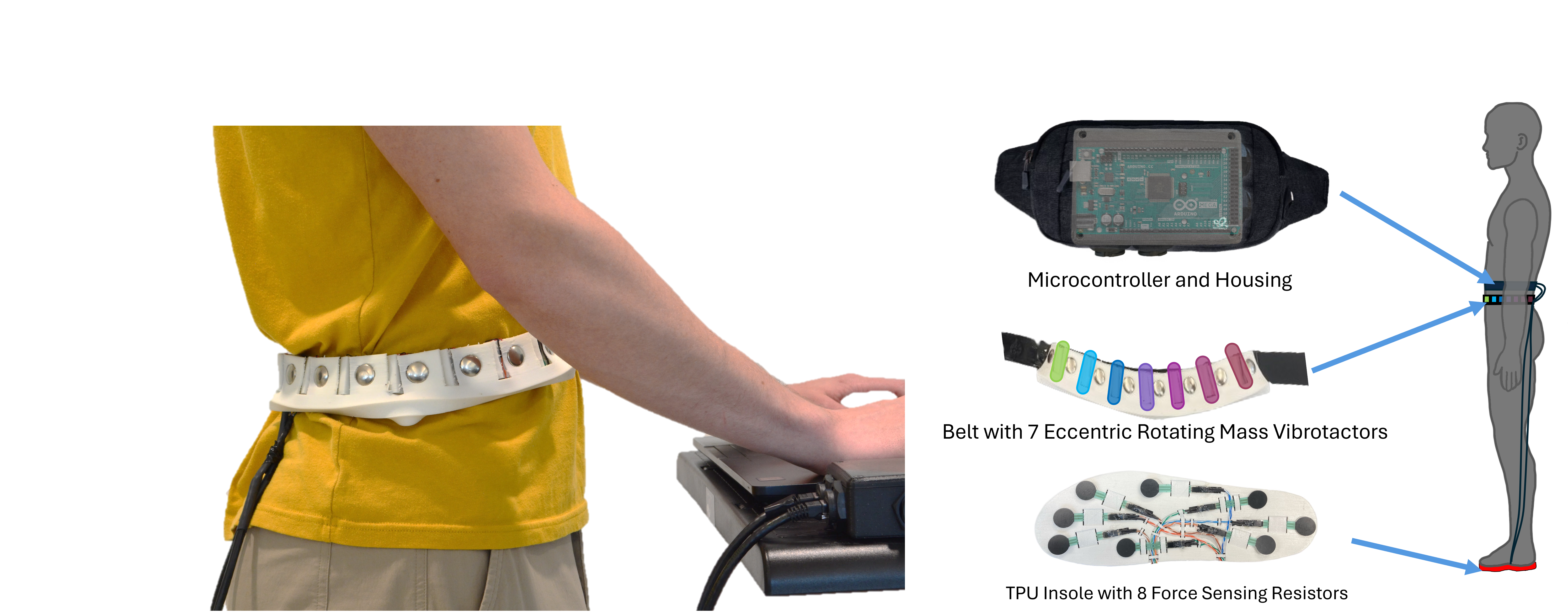
We developed and validated a waist-worn vibrotactile feedback system. We evaluated the effect of standing and walking activities on perceptual accuracy in a vibrotactile cue localization task and found no significant difference in localization accuracy between the two conditions.
Upper Limb:
The Rice Haptic Rocker (Rocker) is a single degree of freedom skin-stretch device used to convey the hand aperture of a prosthetic hand, or how open or closed it is. Experiments in collaboration with the University of Pisa and the Italian Institute of Technology were done to test the efficacy of the (Rocker) to convey the aperture of the Pisa/IIT SoftHand, an under-actuated compliant robotic hand, in three cases:
1) A visually occluded and grasp-controlled experiment as an initial proof of concept
The results of the above experiments showed promise in the application of haptic devices for prosthetic applications. However, the results also showed improvement could be made in the perceptual resolution of the Rocker. Three experiments were done to assess the impact of design decisions on the perceptual resolution of skin stretch: