Submitted by Vinay Chawda on
Category:
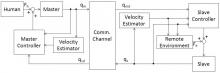
In many mechatronic applications, velocity estimation is required for implementation of closed loop control. Proportional-Integral control based differentiation has been proposed to estimate velocity in bilateral teleoperation. We propose a Second Order Sliding Mode (SOSM) based velocity estimation scheme for this application, since the SOSM approach is robust to small disturbances near the origin. Simulation results demonstrate the superior performance of the SOSM based velocity estimation over the PI-control approach for bilateral teleoperation in viscous environments. Additionally, a novel Lyapunov function based approach to stability analysis of the SOSM based differentiator is presented.