Submitted by Dane Powell on
Category:
We are developing an innovative approach to the control of robotic-assisted rehabilitation and other assistive devices. 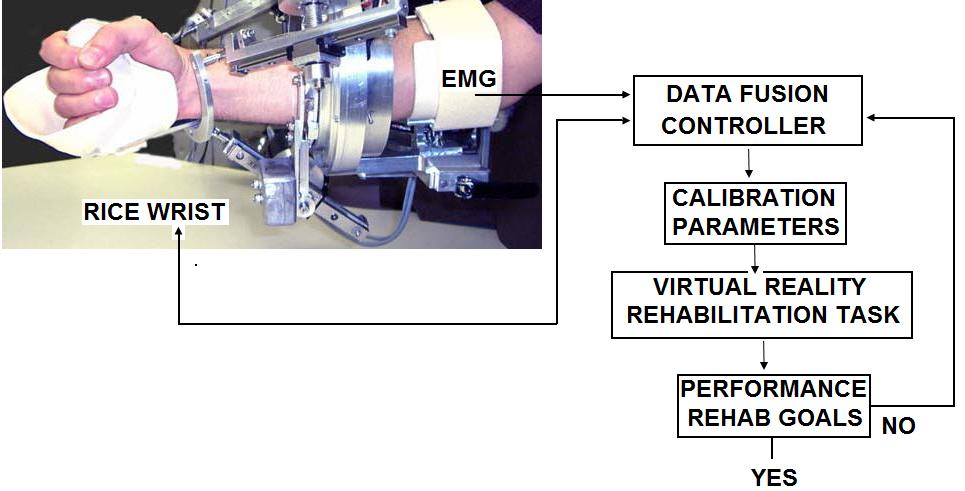
The approach is based on capturing a subject’s residual ability to produce unconstrained motions and mapping the resulting signals into commands to the rehab/assistive device. A majority of the rehabilitation/assistive control schemes are considered to be static, in a way that they do not adapt controller parameters based on the participant’s evolving performance. Adaptive assistive robotic-interfaces has have the potential advantage that the assistance can be automatically tuned to the participant’s individual changing needs, both throughout the movement and over the course of rehabilitation.
Using the Rice Exoskeleton/EMG system, we will determine mappings of performance measures (movement velocity, tremor, reaction time) to motor behavior that will then be used to design a feedback controller to automatically select a set of parameters to achieve a given rehabilitation performance objective. This adds two powerful features to robotic rehabilitation that should be exploited in a suitable way: 1) rehabilitation should be tailored to the specific impairment patterns of each subject and 2) they should adapt to the changing performance level.