Submitted by Marcia O'Malley on
Category:
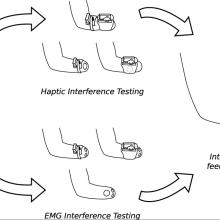
Technology for upper-limb prostheses is rapidly advancing, to the point where multi-articulated myoelectic prosthetic arms capable of complex movement are commercially available. However, these devices still lack the touch feedback needed for dexterous manipulation. We aim to address this concern by developing non-invasive technology to replace missing touch sensations in prosthetic limbs via sensory substitution. Most current sensory substitution devices function as modular add-on devices, separate from the prosthesis. Despite promising results with these devices and potential benefits to users, the extra complexity introduces inconvenience in donning the device and possible failure points at the device interface. Therefore, we are working towards integrating feedback mechanisms directly into the prosthesis socket to create robust, user-friendly devices that facilitate natural haptic interactions. In this integration, a major concern is interference between different feedback mechanisms and electromyographic (EMG) control signals in the constrained space of a prosthesis socket. To address this concern, we aim to (1) characterize interference among haptic feedback modalities, (2) characterize interference between haptic feedback and EMG control signals, and (3) develop compensation strategies and validate prototypes with transradial amputees. This work will transform the nature of amputees' dexterous interactions by enabling incorporation of non-invasive, multi-modal haptic feedback into the prosthesis socket, enabling more effective object manipulation.
Current projects are exploring vibrotactile feedback of gross slip information, skin stretch feedback of incipient slip information, and the integration of multiple haptic feedback modalities in virtual and physical prosthesis testbeds. Recent results have shown that vibrotactile feedback improves users' ability to recover an object that has started to slip.